GPS-free navigation
The state-of-the-art Visual-Inertial Positioning System in the Spectacular AI SDK allows GPS-free navigation based on fusion of data from the camera, IMU and barometric sensors. The method can run under very tight computational constraints in embedded processors.
For aerial use cases (UAVs), we recommend custom hardware with suitable, correctly synchronized and configured sensors, which improves accuracy and robustness over off-the-shelf devices. Contact us for more details.
Aerial use cases
For aerial navigation in GPS-denied environments, the SDK combines Visual-Inertial Odometry (VIO) with a Visual Positioning System (VPS) that refers camera images to satellite images or aerial ortho-photos. This system can maintain comparable level of accuracy to GPS using a single camera, consumer grade IMU and a barometer, in long range fixed-wing flights.
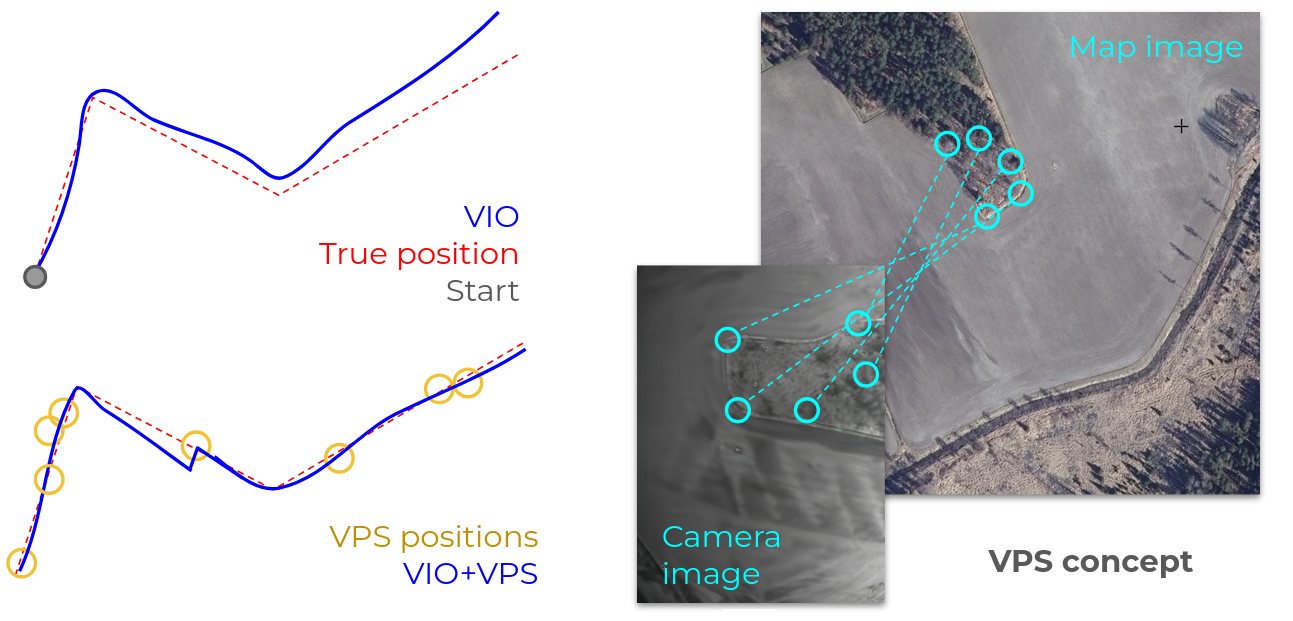
For short-range flights, the Visual-Inertial Odometry (VIO) can maintain acceptable global positioning and heading accuracy without a visual map. Examples with less than 1% drift in short-range low-altitude (< 120m AGL) line-of-sight flight are shown in the multi-rotor test results below.
Long range flight tests (VIO+VPS)
These test flights were performed by Spectacular AI in Finland in 2024 using a Cessna 172 manned aircraft. In terms of flight altitude and velocity, the collected data is similar to beyond-visual line of sight (BVLOS) flight with fixed-wing UAVs.
| Flight | |||||
| 1 | 2 | 3 | 4 | Mean | |
| Error to GPS (CEP) | 9.2 m | 11.8 m | 9.8 m | 9.7 m | 10.1 m |
| Flight length | 50 km | 77 km | 78 km | 92 km | 74 km |
Short-range multi-rotor tests (VIO-only)
This flight test data was recorded by Spectacular AI in Finland in 2024, using a DJI Inspire 2 off-the-shelf multi-rotor UAV.
| Flight | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | Mean | |
| Error to GPS | 1.3 m | 2.9 m | 5.9 m | 7.6 m | 5.0 m | 8.2 m | 5.1 m |
| Flight length | 755 m | 935 m | 1253 m | 1834 m | 2423 m | 3704 m | 1818 m |
GNSS-VIO for land vehicles
In cases where GPS is mostly available, but suffers from outages, which is very common in non-aerial use cases, VIO and GPS can be combined into GNSS-VIO, which provides uninterrupted positioning during outages as demonstrated in the video below.
The red line in the video shows a trajectory from a RTK-GPS system, which can ideally provide centimeter-level accuracy, but fails when the vehicle entere the tunnel. The blue dot and ellipse show the GNSS-VIO position and its estimated uncertainty. The GNSS-VIO provides an uninterrupted position througout the tunnel and converges to the RTK-GPS position once it recovers.
GNSS-VIO can also provide additional information that is not readily available from a (single-antenna) GPS system. In particular the global orientation and velocity can be estimated accurately - even during outages.